|
|
|
|
|
|
Proud supporter of: |
|
|
|
||
|
|
||


|
Gravity Bowl
Motion The following
describes the mathematics and control issues that are important to
coordinating the motion of the GravityBowl highly maneuverable electric
vehicle.
Figure 1: Wheel arrangement and
definition of motion parameters. Equations of Motion Figure 1 shows
the configuration of the three wheels and the coordinate frame used here.
Given time-dependent position
where r is the radius of the vehicle at the
wheel attachment points. These equations can be differentiated to give the
velocity equations which describe the instantaneous ground velocity at each wheel center:
Note that these velocities depend on the forward
velocity of the vehicle Steering Angle and Speed It is useful to
compute the steering angle
The speed of motion of each wheel is equal to the magnitude of the velocity vector:
Steering Vectors Instead of using the
steering angle and speed it can be more useful to work out the velocity
vector of each wheel in the coordinate frame of the vehicle, rather than in
the frame of the ground plain. To do this we simply convert
This leads to
These are the
main equations that we need to work with. By way of
example, when the overall velocity vector The meaning of Analysis of Motion There are two
ways of thinking about the motion of the vehicle, depending on whether you
are looking at it from the point of view of the ground plain or of someone
sitting on the vehicle. If the vehicle rotates and translates then an
observer outside will see the vehicle move along a fixed direction and rotate
about its moving center. Equations (2) describe this scenario. Alternatively,
from the perspective of a passenger there is no rotation. Instead, the
forward motion of the vehicle looks like a motion vector that spins around as
the vehicle moves. This is described by the set of equations (6).
Figure 2:
Three modes of motion. Note that the circle here indicates the length of the
vectors produced by rotation; it is not the GravityBowl outline. Let’s use
equations (2) to visualize how the motion changes for each wheel over time.
In this case there is one translational velocity vector The next
important situation arises when Alternatively we
can look at what happens from the viewpoint of the vehicle in which case we
use equations (6). Figure 3 indicates this situation. There are three
tangential velocity components of length
Figure 3: Wheel velocities in
relative to the vehicle. The center circle is the outline of the GravityBowl. We can use a computer
simulation to help us understand what happens in a realistic case. Here we
consider two scenarios of motion: accelerating linear velocity and
accelerating rotation. Consider the case
when the vehicle is initially at rest but is spinning about its center. From
this position we accelerate the vehicle along the x-axis with constant
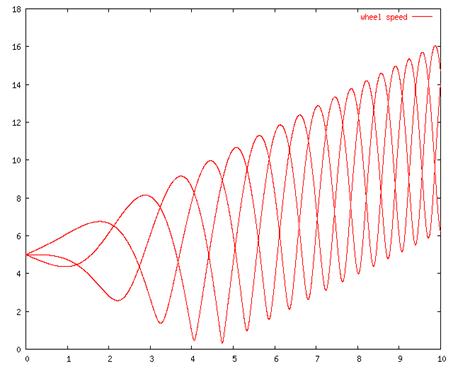
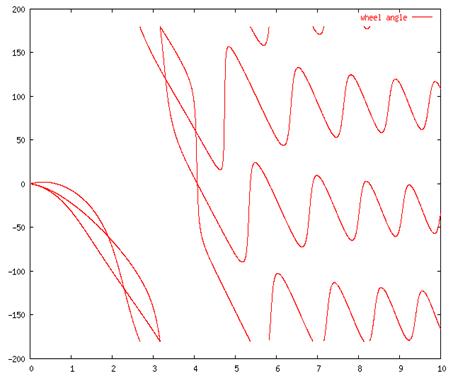
acceleration. Figure 4 shows graphs of steering angle and wheel speed for
this situation. The vehicle passes through the three modes of Figure 2 from Figure 5 shows
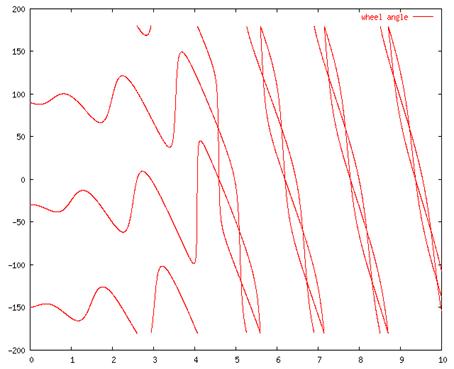
what happens when the vehicle is initially moving along the x-axis but slowly
begins to rotate. Similar mode transitions occur as in Figure 4 but in the
opposite direction. The ground tracks of the wheels for the two different
types of acceleration described here are plotted in Figure 6. Figure 7 shows
the three modes as a graph. Independent control of
Figure 4: Graph of wheel speed (top)
and angle (bottom) for constant velocity but accelerating rotation.
Figure 5: Graph of wheel speed (top)
and angle (bottom) for constant rotation but accelerating horizontal motion.
Figure 6: Motion tracks made by the
three wheels. Top: Constant velocity, accelerating rotation. Bottom: Constant
rotation, accelerating horizontal motion.
Figure 7: Graph showing regions of
different types of motion. Wheel Skid and Velocity Error The steering
angles and wheel speeds form a six dimensional space which can be
parameterized by the velocity vectors We can compute
the ground velocity and rotational speed that would result from an arbitrary
set of wheel velocities
Likewise we can
work out an “average” value for
Let’s use vector
notation and let
We can use this
error measure to indicate the extent of slippage over time by evaluating the
magnitude of the vector E. We will
use this result in the future when we need to check the performance of the
servo systems. We can check the
above result by putting the equations for W from (6) into this formula in place of U. In this case E
turns out to be zero indicating that any valid steering vectors fall into the
null space of this matrix. Tricycle Motion One simple method
of steering is to keep two “back” wheels at a steering angle parallel to the
direction of travel and steer with a “front” wheel. The configuration for
this is shown in Figure 8.
Figure 8: Geometry of tricycle
configuration. Let us use
The angular speed
of motion around the turning center Z is given by
These equations
show that when turning left, wheel 1 moves slower than We can now use
equations (7) and (8) to calculate the motion of the vehicle in terms of its
ground velocity and the rotation about its center point:
and
As one might
expect, the tricycle turns in a circle of radius R and vector
|